
FELICE
FELICE addresses one of the greatest challenges in robotics, i.e. that of coordinated interaction and combination of human and robot skills.
Read more...

Surgical Trainer
Prototype of a surgical telemanipulation system with force feedback. It contains two robotic slaves, driving two surgical tools.
Read more...
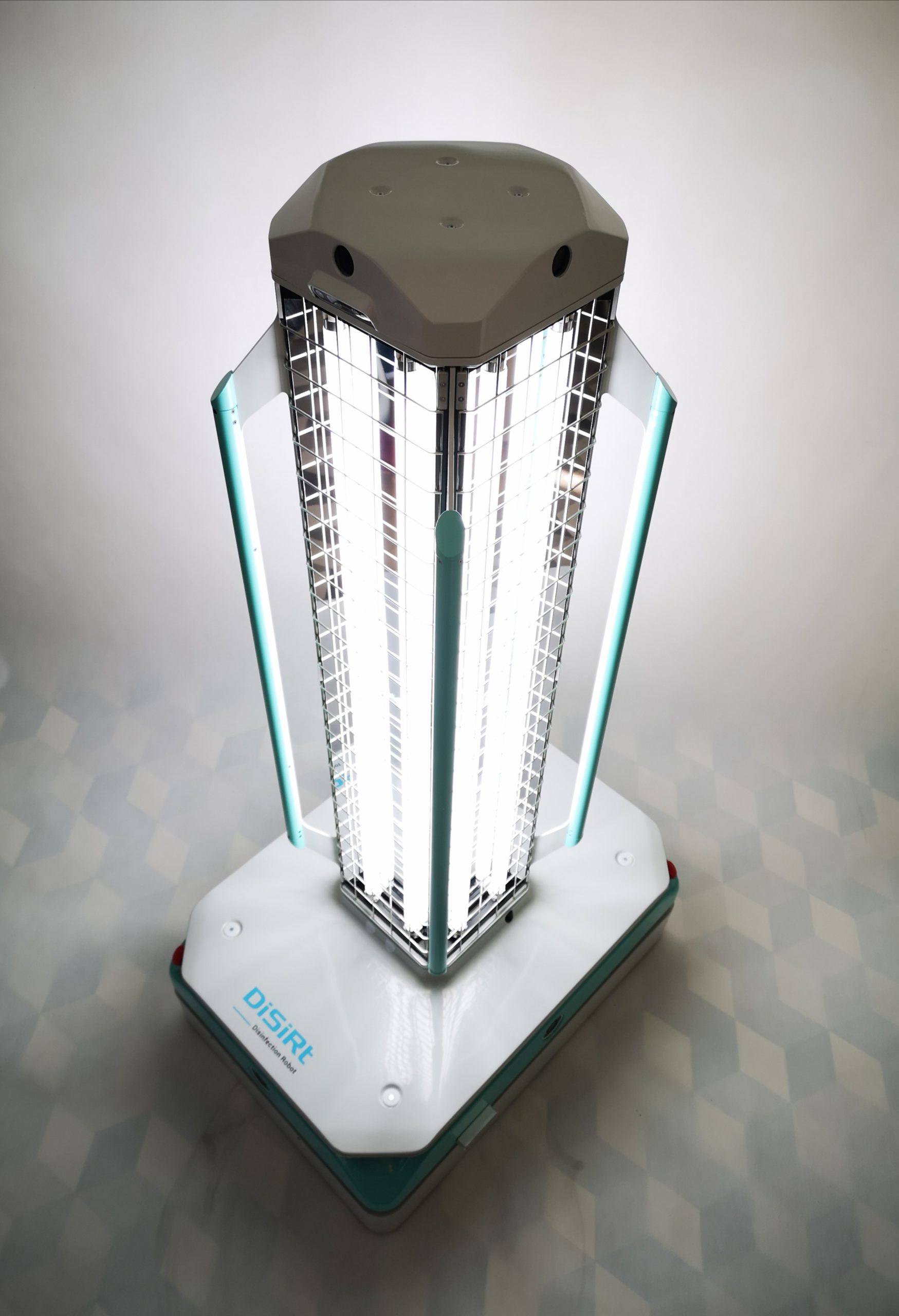
Disirt
The new generation of DiSiRt disinfection robots is designed to safely disinfect rooms where many people are present during the day.
Read more...

BATEO
BATEO is an artificial arm mounted on an electric wheelchair to replace the dysfunctional arm of handicapped patients...
Read more...
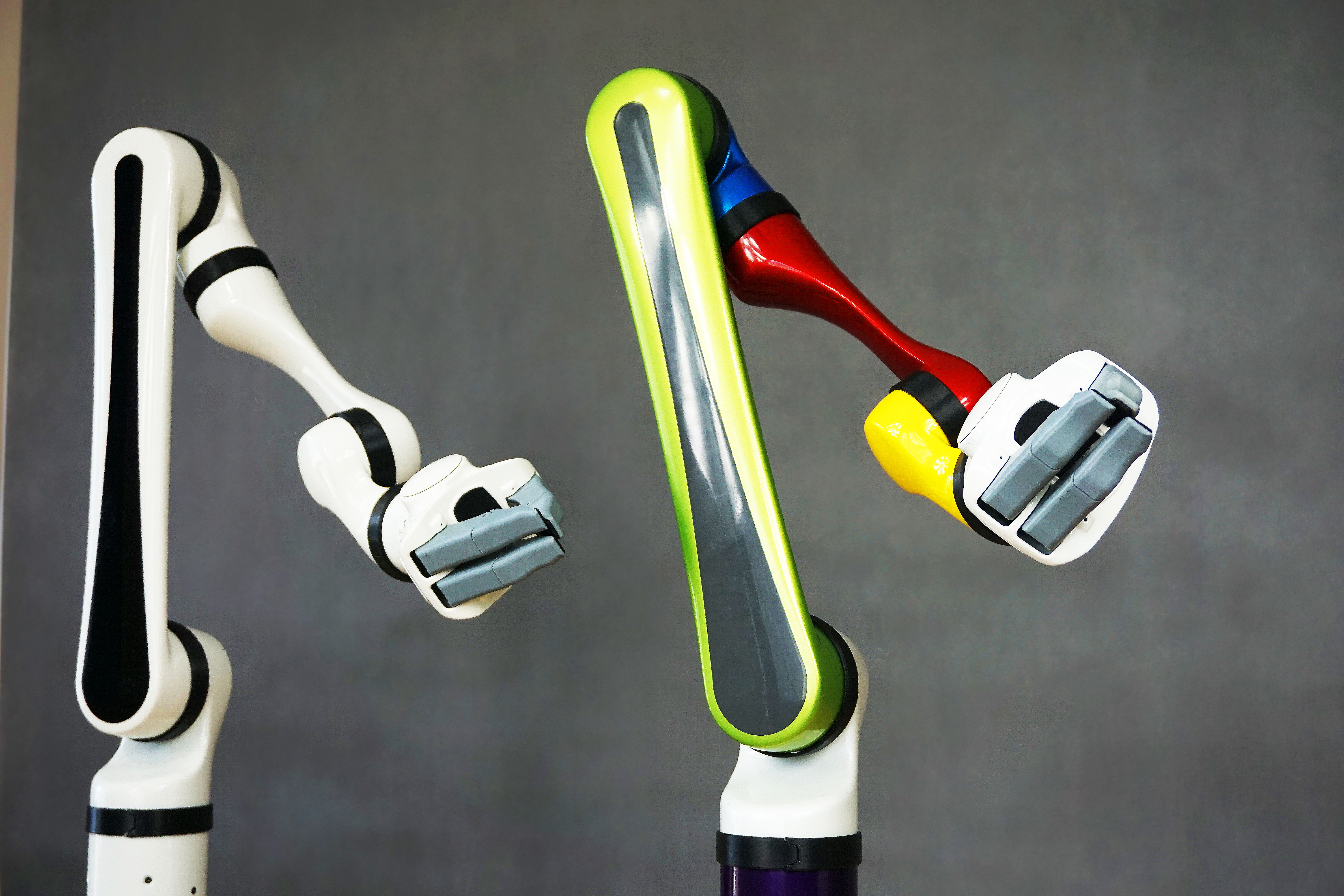
ARIA
ARIA is an intelligent and very light robotic arm. The spectrum of its applications is very wide. The arm is operated by an intelligent control system...
Read more...

ROBOTIC PLATFORMS
Indoor omnidirectional motion
Omnidirectional Platform with Suspension
Mobile 4W Platform
Mobile platform with suspension.
Read more...
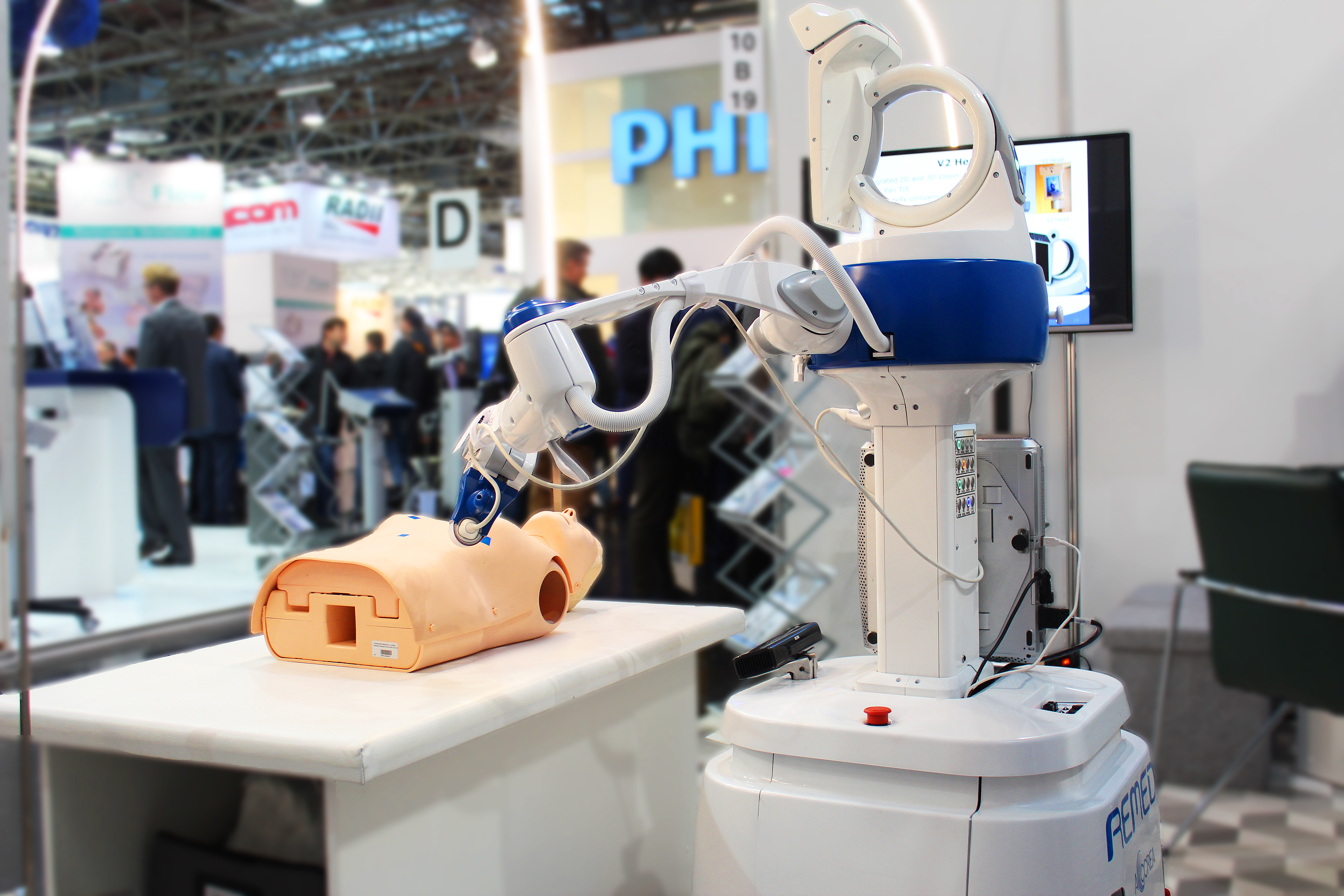
REMEDI
In the frame of the project ReMeDi, a robot system is designed that features medical tele-examination of patients. Successful medical treatment...
Read more...
RAMCIP
Supporting elderly people with Mild Cognitive Impairment is key to helping them lead independent lives for longer. Robot Reserach to help...
Read more...

Dual Arm
A large research and development project was performed on behalf of (LSR) Munich. The humanoid robot project involved...
Read more...

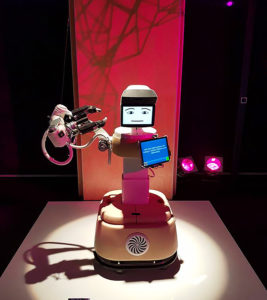
Emohead
21 efficient servo actuators (actuated eyes, eye lids, eyebrows, lips, ears, mouth). Preprogrammed and user-defined emotions...
Read more...

MOBOT
Mobility disabilities are prevalent in our aging society and impede activities important for the independent living of elderly people...
Read more...
IURO
The goal of the interactive Urban Robot (IURO) project is to develop and implement methods and technologies enabling robots to navigate...
Read more...